Global Chassis Control
Control of a road vehicle's driving dynamics
Johannes Koeppern, 2008–2019
The present global chassis control (GCC) was developed during my work at the German Aerospace Center (DLR) in Oberpfaffenhofen near Munich. It forms the interface between two levels:
- the motion demand (longitudinal, lateral, and yaw acceleration) and
- the actuator variables in the vehicle (drive/braking torques and steering angle rates).
The GCC exploits the full vehicle dynamic potential: in a holistic approach, it determines all actuator variables from the requested acceleration in a single step. It uses a precise vehicle dynamics model that during operation
- can be reconfigured and
- incorporates additional intervention options such as rear-axle steering or torque vectoring.
This eliminates the coordination effort currently required between individual vehicle dynamics control systems — as well as their negative mutual influence.
I wrote my dissertation on this control system and defended it in 2019 at TU Dortmund under Prof. Torsten Bertram.
The Control Concept
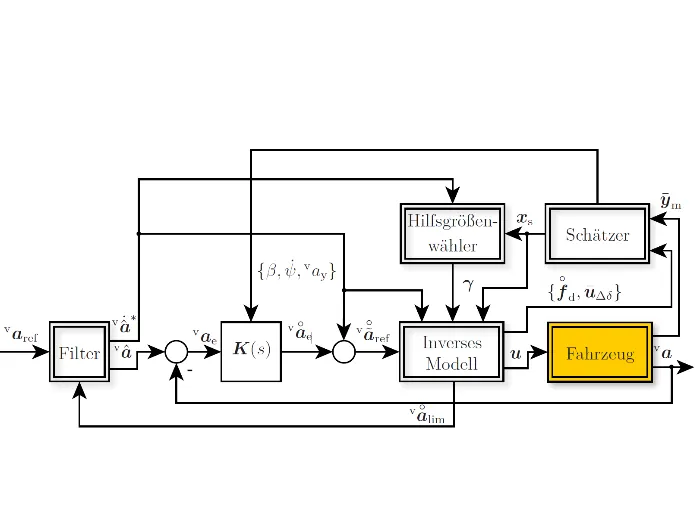
For over-actuated vehicles, the GCC first introduces reduced actuator variables that are mapped to the actual actuator variables via auxiliary variables. The auxiliary variables are chosen to achieve a secondary objective. From these auxiliary variables, the vehicle states, and the requested acceleration change, an inverse model then computes the reduced actuator variables (see dissertation).
Interactive Block Diagram
Click on the blocks for detailed explanations from the dissertation.
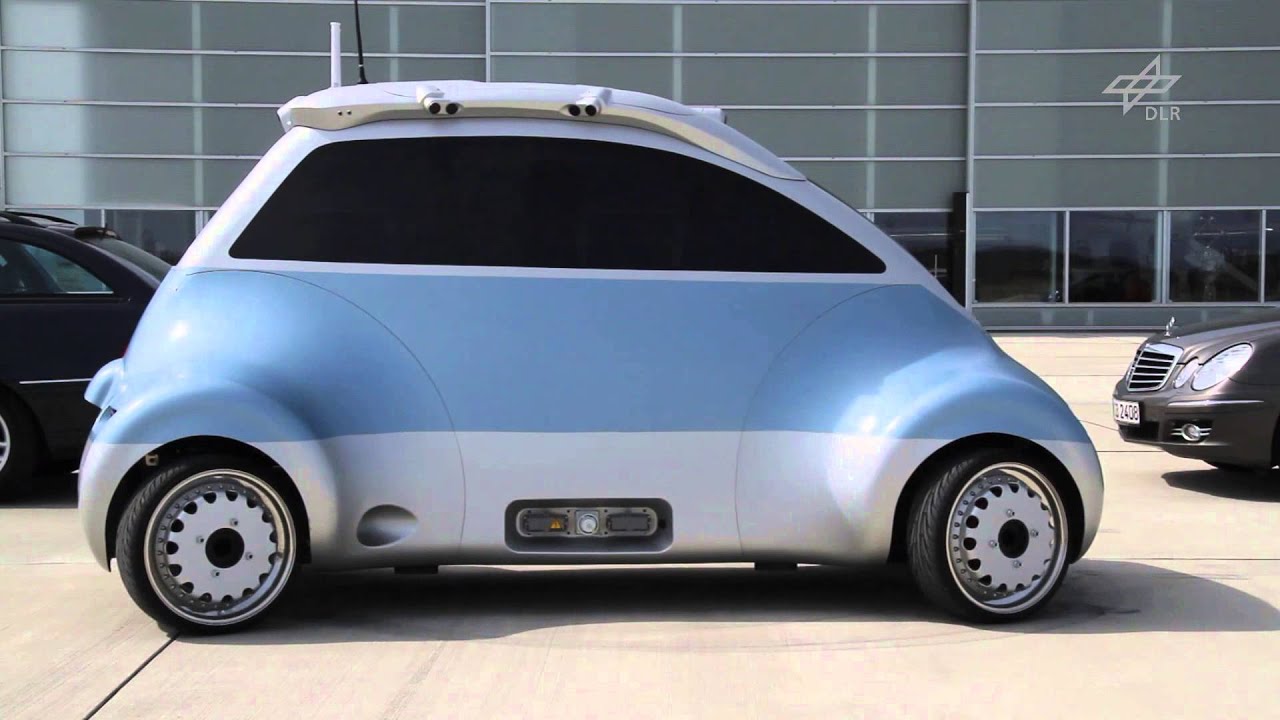
Test Vehicle ROboMObil (ROMO)
At DLR, I co-developed the ROboMObil (ROMO) test vehicle. The ROMO has four independent drive/braking torques and four independent steering angles — eight actuator variables in total that affect the vehicle acceleration. However, my global chassis control is not limited to this vehicle but can also be applied to other configurations, such as today's production vehicles.
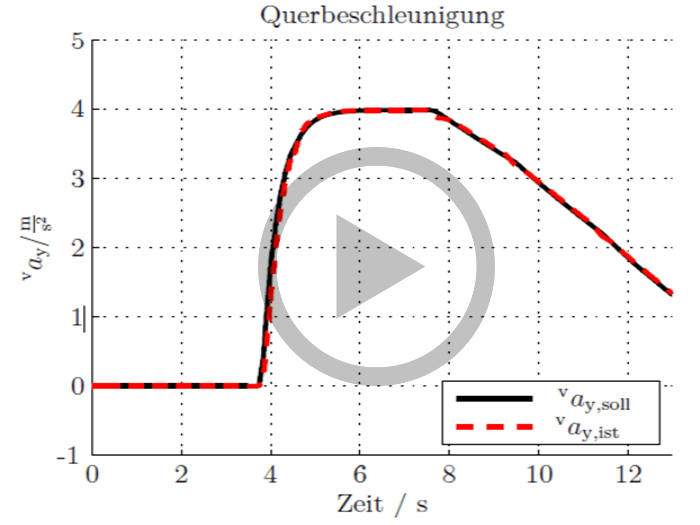
Simulation
I developed the controller in the Modelica language using Dymola and identified plant parameters with Matlab among other tools. Via the Functional Mock-Up Interface, I exported it as an AUTOSAR component and subsequently validated it in closed-loop simulations with multi-body vehicle models.
My Publications
Robotic Motion Simulator
Using the robotic motion simulator of the DLR Institute for System Dynamics and Control Engineering, I built an interactive driving simulation. The robot moves the driver according to the simulated vehicle dynamics.


About Me
Johannes Koeppern studied mechanical engineering at TU Munich from 2003 to 2008, specializing in control engineering. From 2008 to 2013, he worked as a research associate at the German Aerospace Center (DLR), where he co-developed the ROboMObil test vehicle, designed the global chassis control presented here, and led DLR's contribution to the European research project Modelisar. He defended his dissertation at TU Dortmund in 2019.
From 2014 to 2019, he founded and led Ocuplus as managing director, a company that provided visually impaired and blind students with barrier-free dictionary access in exams through software. After a position as Senior Project Manager in the automotive industry, he worked from 2020 to 2023 as a Data Scientist and R&D Engineer at Dispendix GmbH in medical technology.
Since 2023, his focus has been on AI and Large Language Models: as an AI & Data Science Expert at Education Partners, as a lecturer at HS Macromedia, and as founder of NarratiQ. He holds 24 patents in the fields of vehicle dynamics control, accessibility, and medical technology.
Download
The complete dissertation is available for download as PDF.